Projects

Autonomous Electrical Weeding Robot
Built an autonomous electrical weeding robot prototype in 2 days. Hacked together the mechanical and electronics, developed basic gap finding navigation algorithm.

F1TENTH Autonomous Vehicle
Building the F1TENTH autonomous racing car for ICRA 2024. Worked on perception, planning (global and local), control, and algorithms in ROS2.
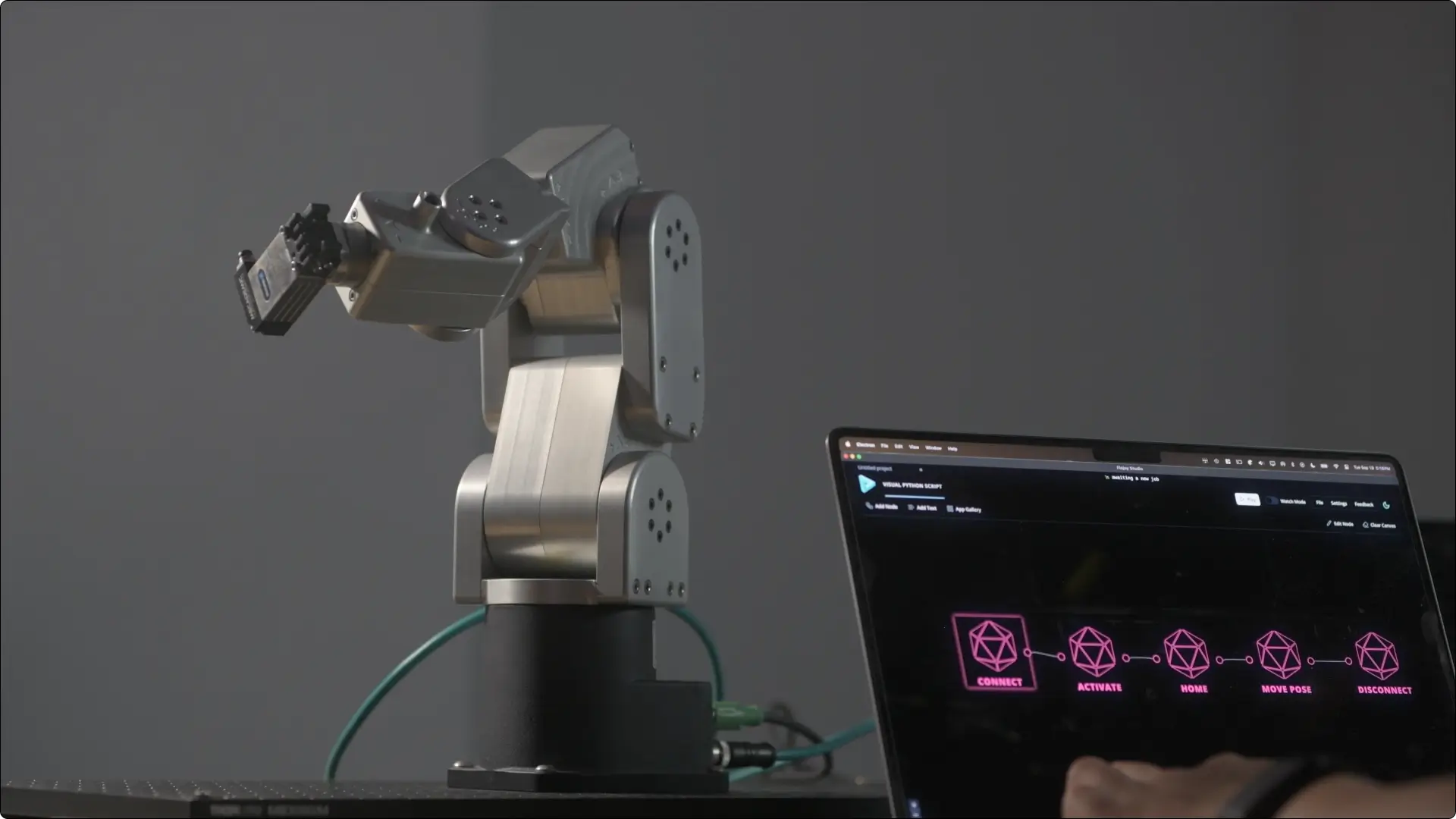
Flojoy Robotics
Robotics development is complex and difficult. I partnered with Jack Parmer, founder of Plotly and Flojoy, to make robotics integration and deployment easy for engineers and businesses.
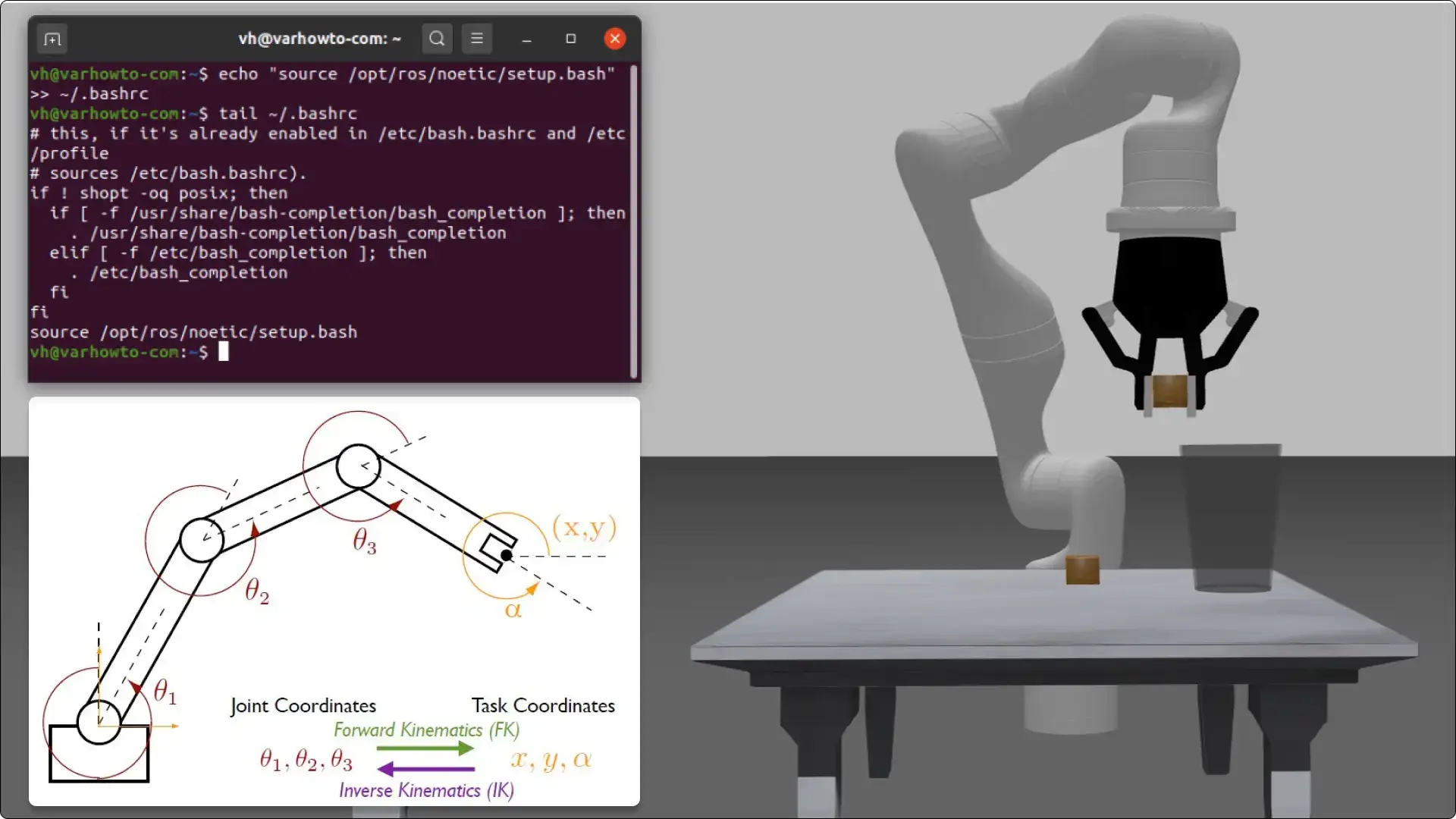
ROS Robot Manipulator Controller and Planner
ROS C++ kinematics and dynamics controller, cubic polynomial trajectory planner, and action client/server for robot manipulator pick and place tasks.
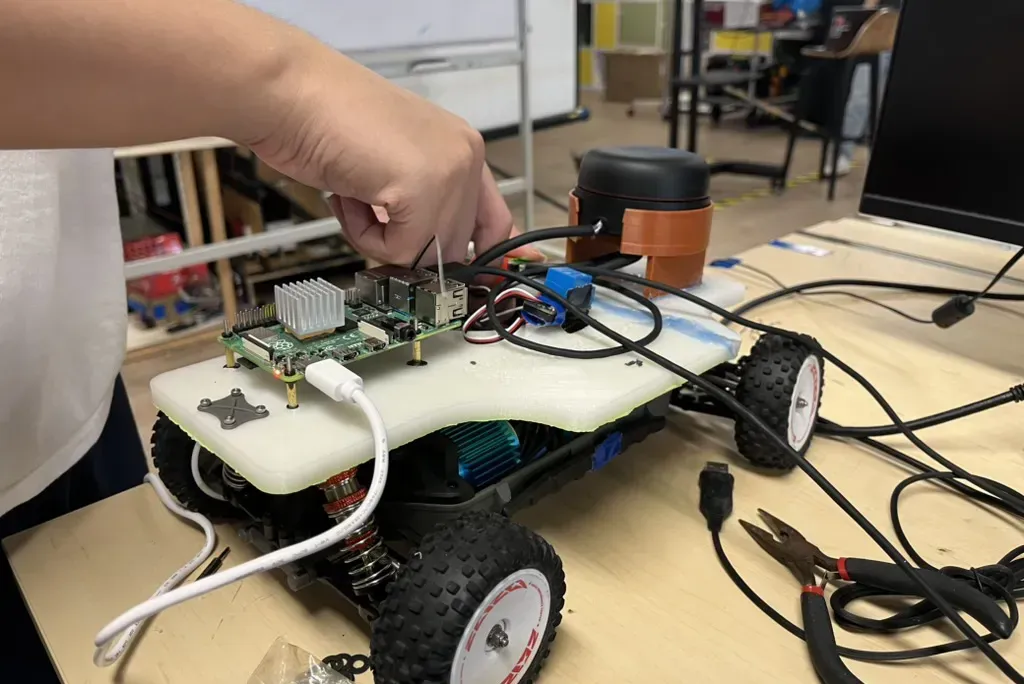
DUM-E Inspection Platform
Prototype inspection robot for infrastructure anomalies such as cracks or water leakages using thermal imaging. LiDAR based autonomous navigation and localization.
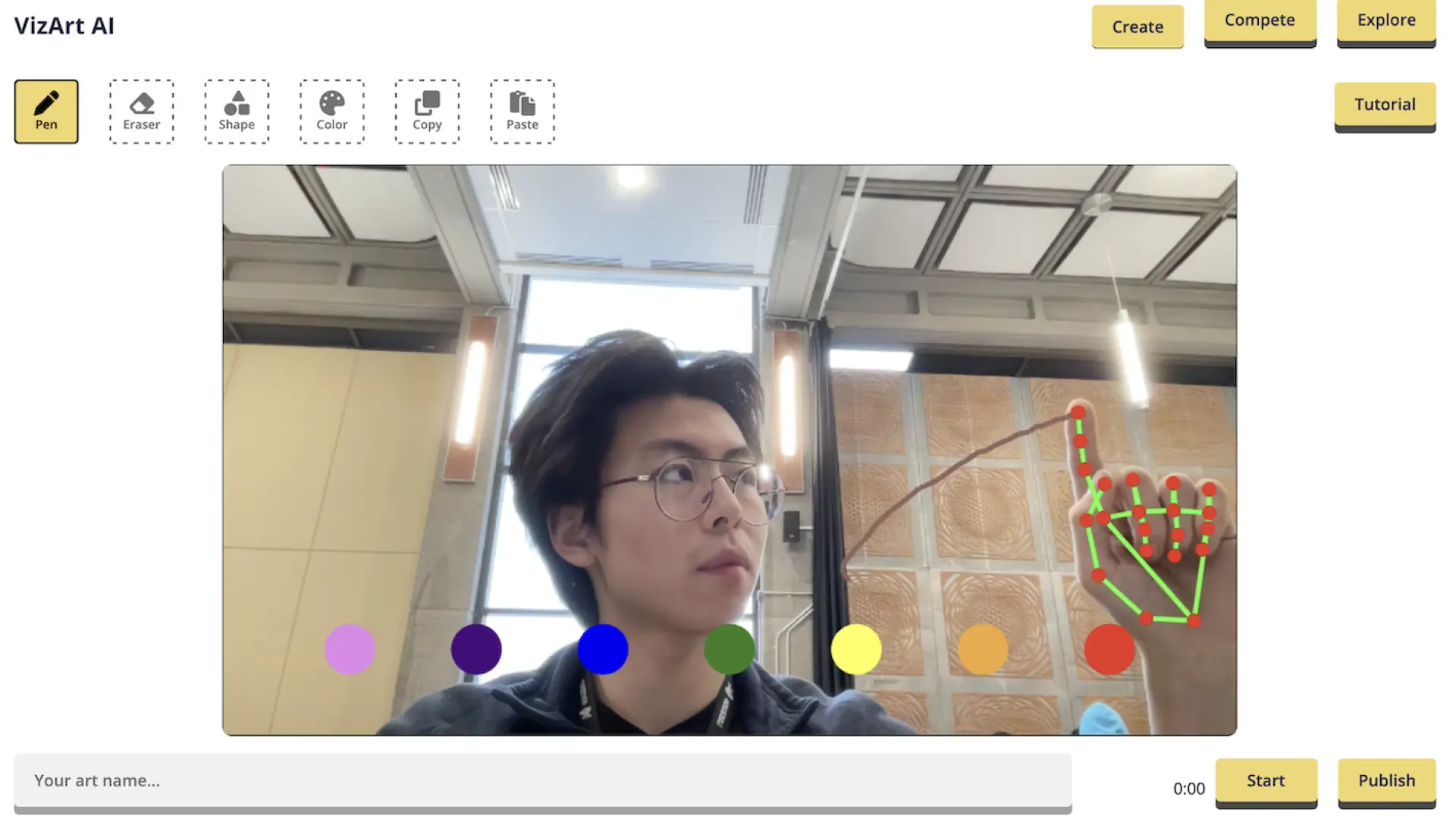
VizArt Air Drawing
An awards winning game based on drawing with computer vision. Captures joint coordinates and uses vector algorithms for gesture recognition.
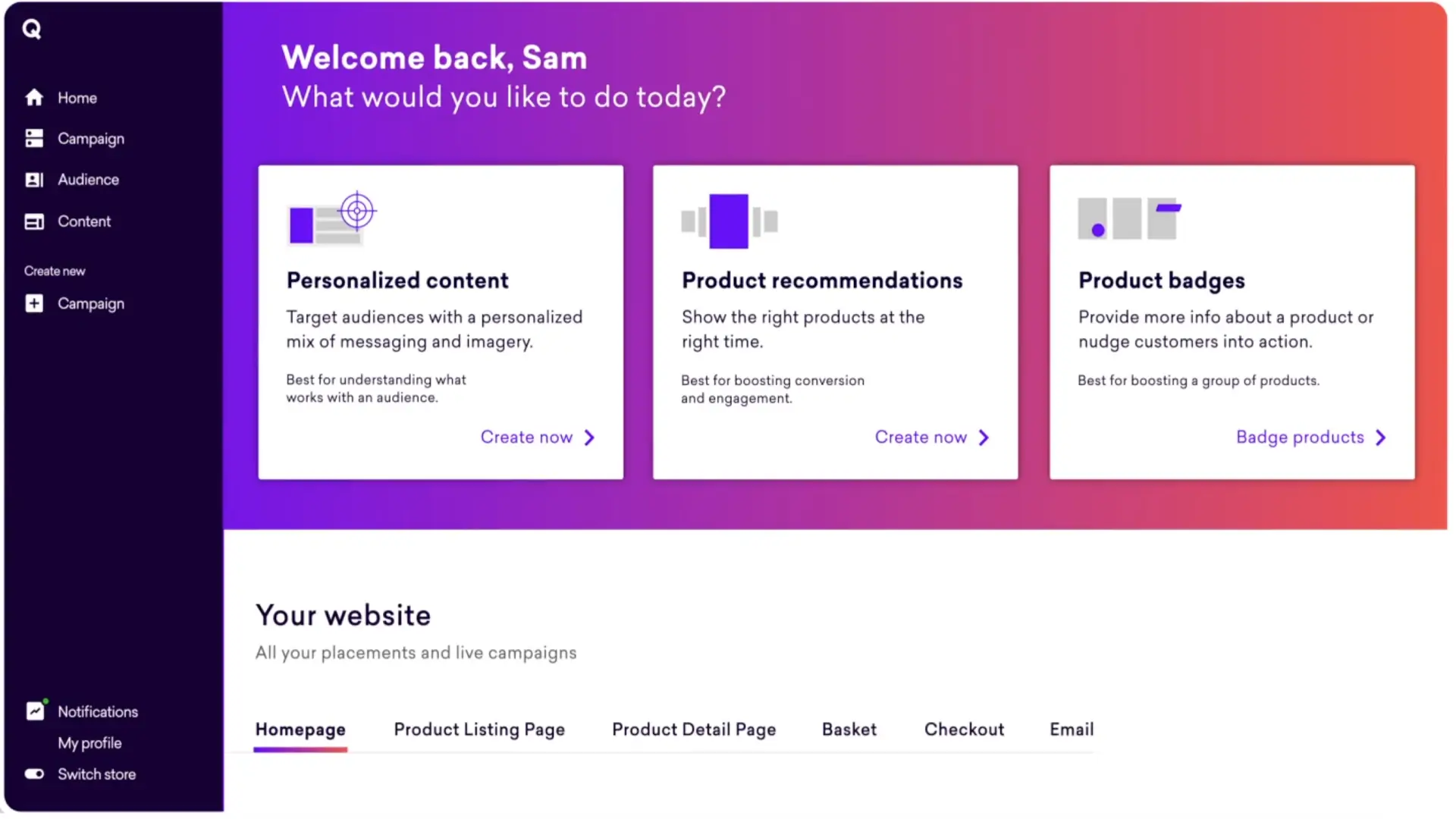
E-commerce Platform @ Qubit (Coveo)
Engineered features at Coveo Qubit for live database editing, automating processes, and DAG workflow for the Qubit e-commerce platform.
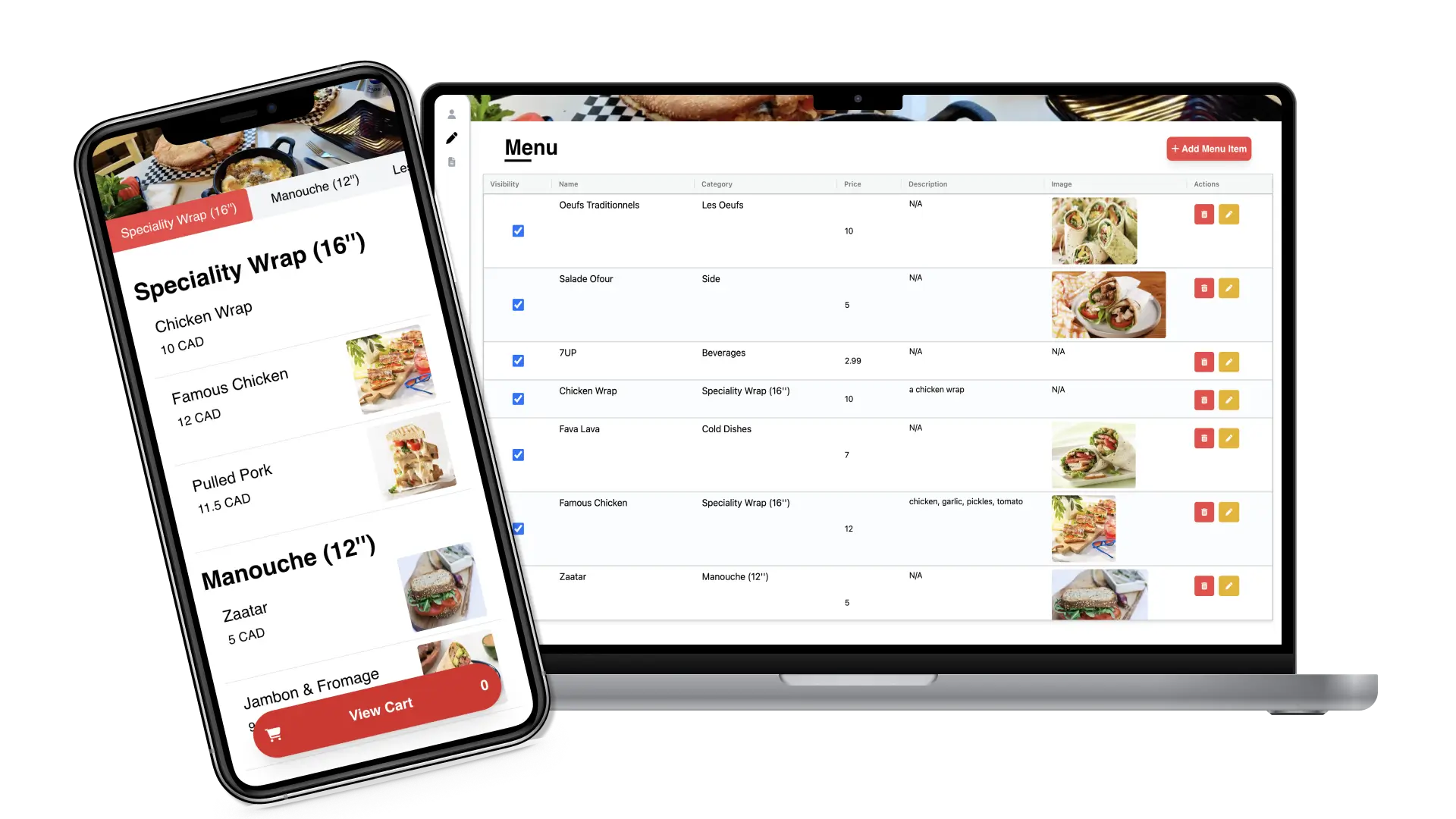
Streamline PoS
Point of Sale (PoS) platform for restaurants, expediting customer ordering while bolstering financial tracking and efficiency.
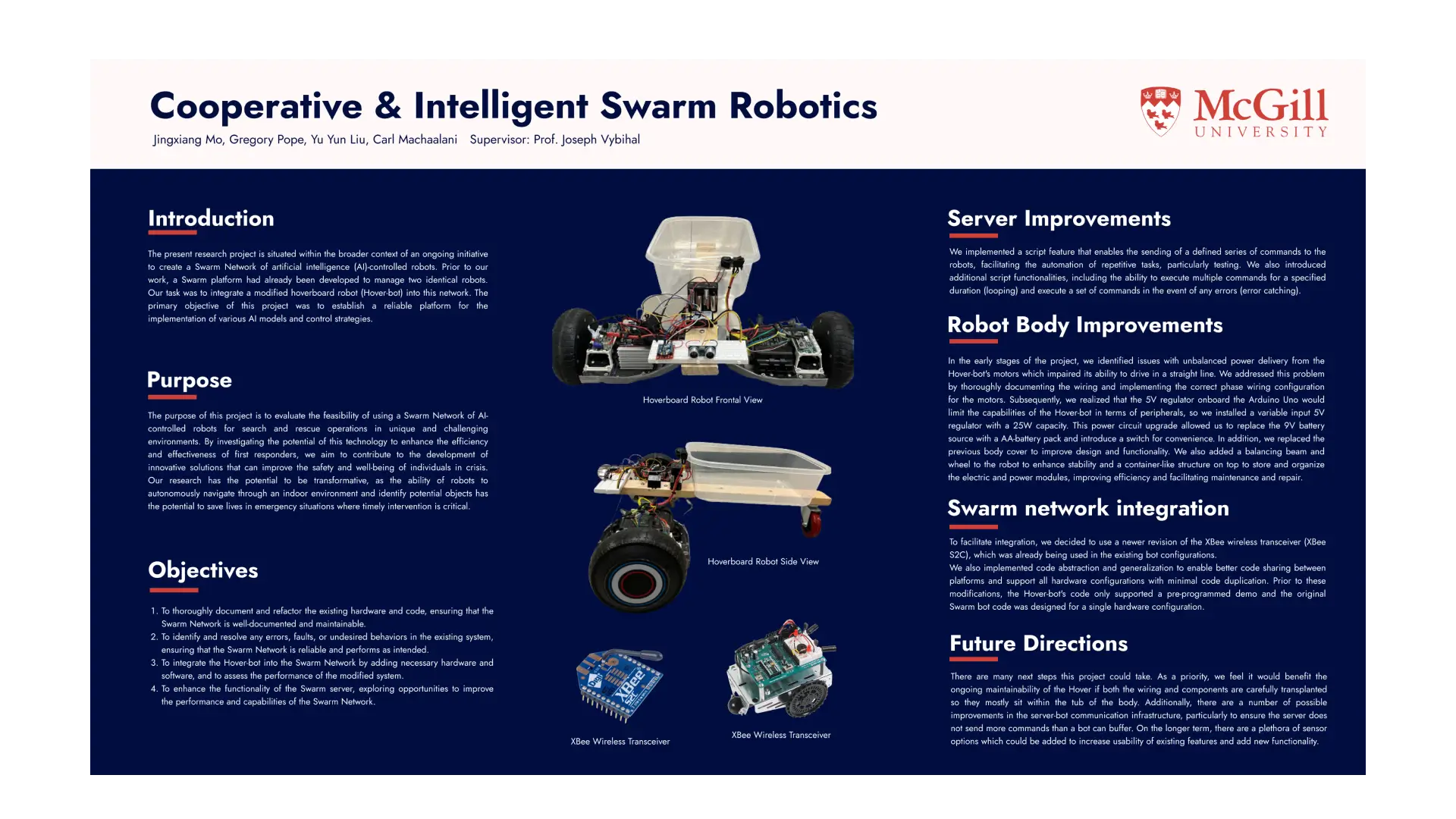
Cooperative & Intelligent Swarm Robotics Research
Developed a robot to research AI-driven robotics co-operations and intelligent swarms.

McGill Projects Community
Creator and maintainer for a community of people building cool projects with 500+ members.

Pharmascience Market Intelligence System
A cutting-edge market intelligence platform for Pharmascience. Designed to integrate internal and external data into one application for analyzing market predictions and product performance.
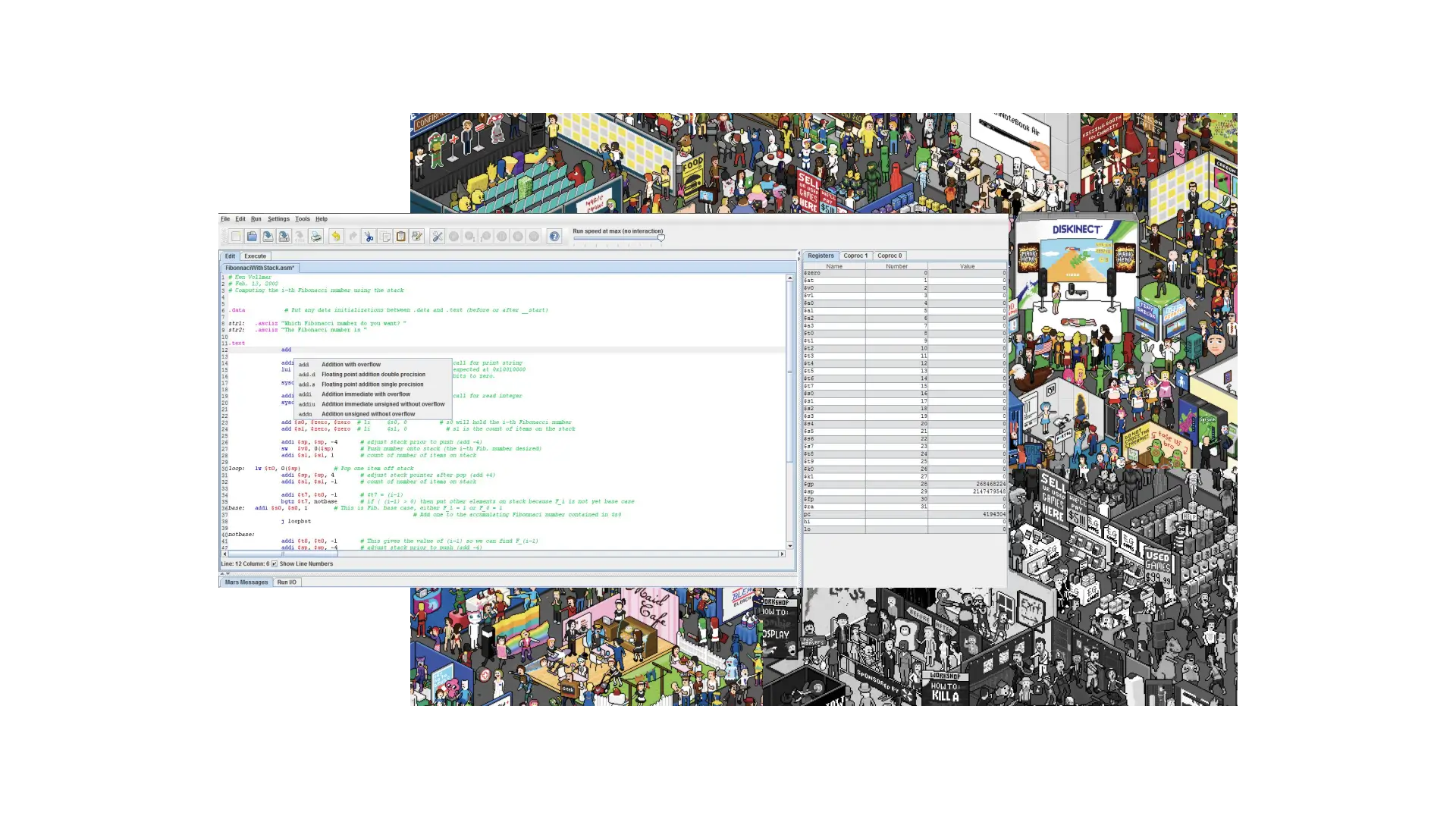
Cache Optimized Template Matching Algorithm
Cache optimized template matching algorithm implementation in MIPS Assembly Language.